Gardening Robot
February - May 2022
Northeastern University - Cornerstone Design Project
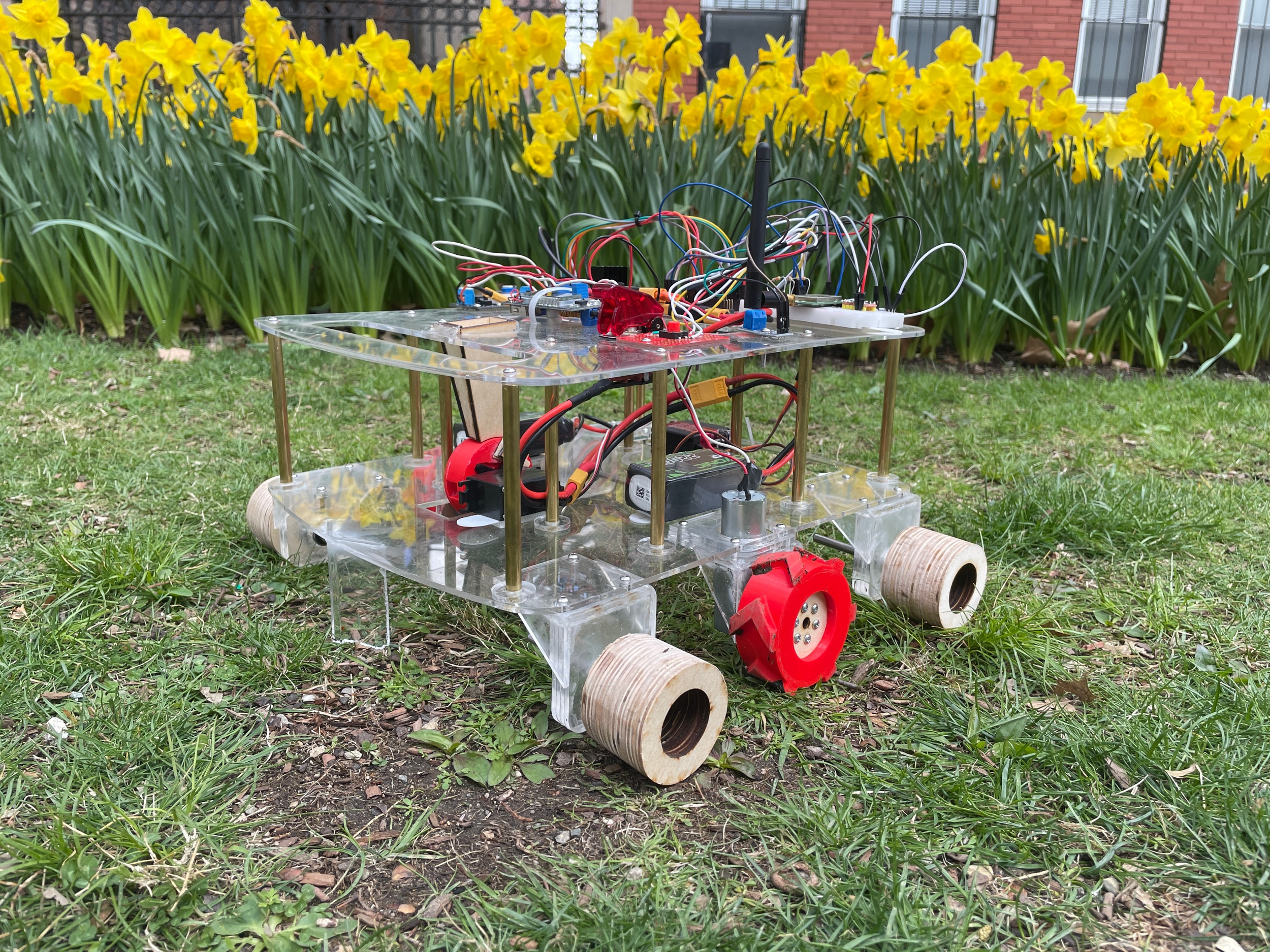
In my Cornerstone of Engineering class, I collaborated with three peers to design and build a gardening robot that could dig a trench, plant seeds, and cover them with soil. This project integrated lessons in mechanical design, programming, and fabrication.
My primary responsibility was designing the robot’s wheels. I developed and iterated on both the inner driving wheels and the outer driven wheels for optimal performance and stability. Our original design had issues with grip and not sinking into the soft dirt, so I researched wheels on heavy farming equiptment and added large chevrons to the driven wheels and increased the contact area on the outer wheels. These designs were modeled in SolidWorks and fabricated using an FDM 3D printer and a laser cutter to allow rapid iteration.
Beyond design, I contributed to programming the robot’s driving and manipulation systems in C++, ensuring smooth operation and task execution. I also contributed to the fabrication process, assembling and iterating on the final version of the robot.
This project highlights my skills in mechanical design, prototyping, and collaborative problem-solving while giving me experience in integrating software and hardware.