Intake Mechanism
January - March 2020
Cheltenham High School - FRC Robotics Team
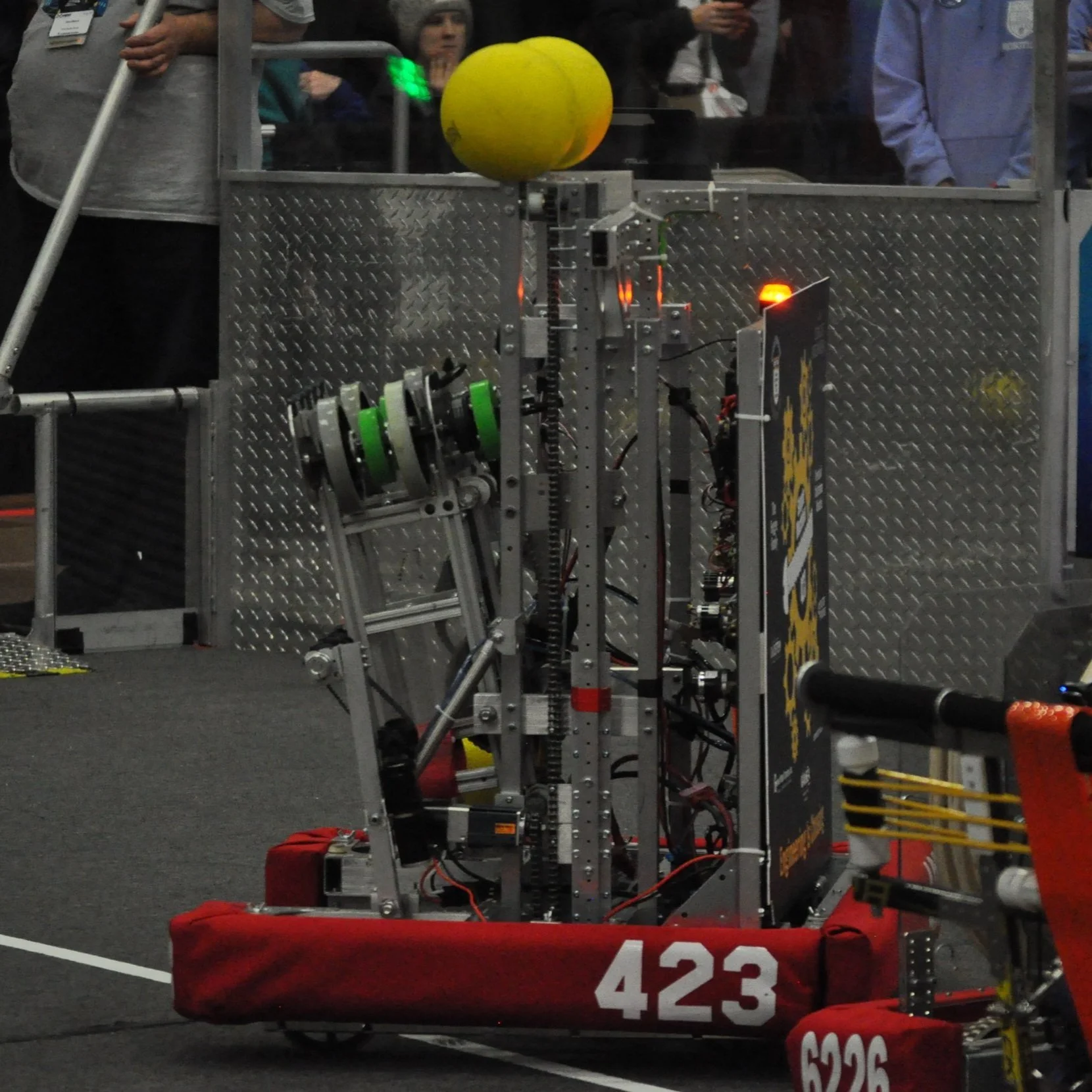

On my high school robotics team, we were tasked with creating a robot that could shoot 7” foam balls into a targets at various heights. Our shooting mechanism would pick up balls from the ground to hold until we could line up our shots, but we encountered a significant challenge in our design. The robot’s shooting mechanism was effective but could only pick up balls that were centered in front of it. This limitation made it difficult to pick up balls quickly and reliably during matches, reducing our scoring potential and putting us at a disadvantage. I decided to develop an intake mechanism to address it and make our team more competitive.
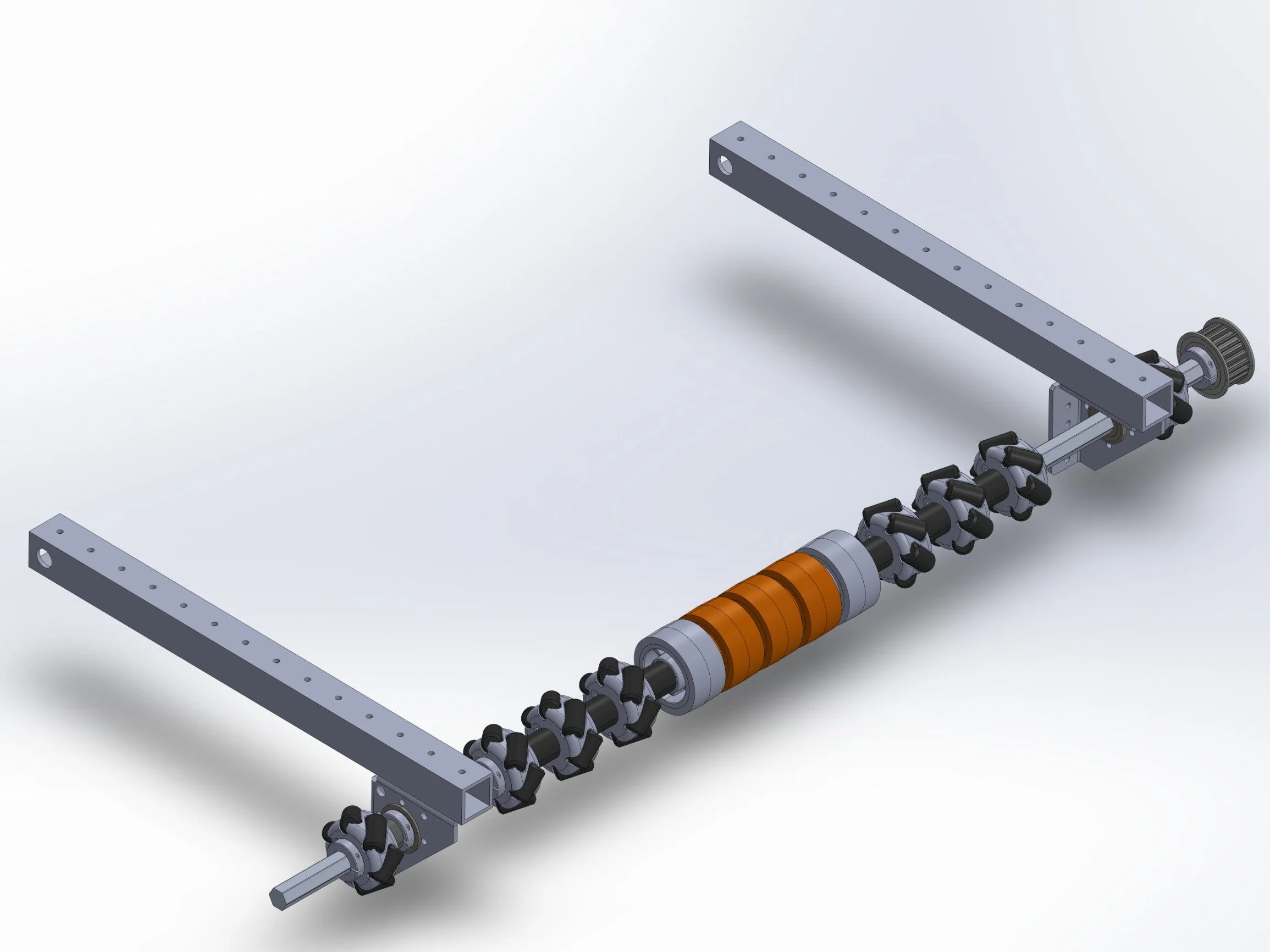
My goal was to create a system capable of automatically centering balls, ensuring smooth handoff to the original mechanism and significantly improving our robot’s performance. After brainstorming and prototyping, I designed an intake mechanism that utilized a combination of Mecanum wheels and compliant wheels. This setup effectively funneled balls to the center, regardless of their initial position. To make the system adaptable, I incorporated two pneumatic cylinders, allowing the intake to deploy for ball collection and stow away when not in use.
The design process involved using SolidWorks to model and refine the mechanism, ensuring it met competition constraints. I had to consider weight, budget, and the physical integration with the rest of the robot. Once the design was finalized, I brought the concept to life using power tools and hand tools. The final mechanism was reliable and increased our shooter scoring potential by over 60%.
As the first week’s competition went on, teams realized defense was a viable strategy, and the foam balls could very easily get sucked under the drivetrain beaching the robot or gumming up the gearbox. Another benefit of my intake mechanism was that it could spin backwards when traversing the field, allowing us to not worry about the balls and letting us focus on defense.
This project taught me the importance of iterative design, effective problem-solving, and balancing multiple constraints while working within a team. It also solidified my passion for combining engineering principles with practical, hands-on implementation to create impactful solutions.